
The automotive industry has been working for many years to minimize noise within the passenger compartment. Reducing the sound produced by various accessory motors is part of the solution on which suppliers to OEMs are focusing. Understanding the causes of noise generation and the techniques to mitigate them are a critical part of motor design considerations. Magnequench, an expert in bonded neo magnetic powders, magnets, and their applications, has written a whitepaper on a technology solution to lowering electric motor noise.
Typically, noise produced by an electric motor is due to following reasons: Electromagnetics; mechanical structure; aerodynamics.
Cogging torque is one of the most prominent electromagnetic causes of noise generation in a motor. Cogging torque is defined as the attraction/interaction of the magnetic poles to the teeth (steel structure) of the laminations within an un-energized motor.
Cogging torque can be reduced by selecting appropriate variables as the motor is being designed. Three such design variables are: (i) the combination of slots and poles, (ii) the opening of the slots, and (iii) the flux profile of the air gap.
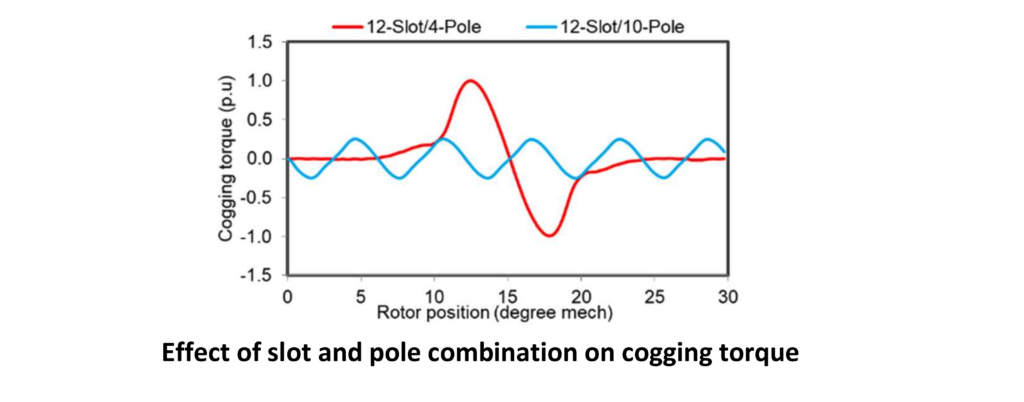
Combination of slots and poles
The combination of slots and poles should be such that the variation in the reluctance seen by the air gap flux is minimal. A motor (or motors) with a fractional number of slots per pole generally leads to lower cogging torque compared to one with integer slots per pole.
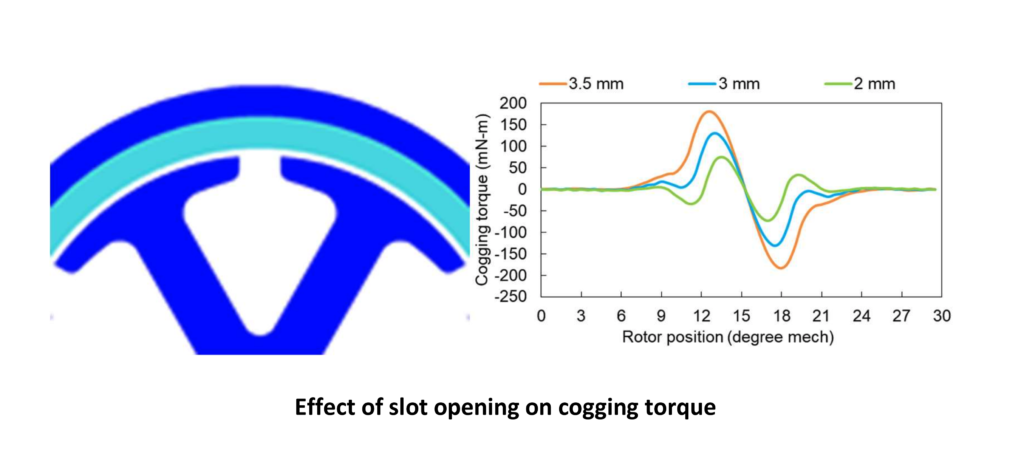
Opening of the slots
A smaller slot opening leads to lower variation in reluctance and hence lower cogging torque. The slot opening should be as minimal as possible, given the requisite conductor diameter, and also ease of automatic winding in the manufacturing process. Typically, a slot opening should be two to three times the insulated conductor diameter.
Flux profile of the Air gap
Air gap flux profiles can be changed by using various methods: (a) Magnetization and (b) Skewing either the stator teeth or the magnet Skewing either stator teeth or the magnet arc is a common approach for motors designed with anisotropic sintered magnets like sintered NdFeB and sintered ferrite. Manufacturing a motor which has skewed stator teeth can lead to higher scrap rates for winding wires. The alternative, using a skewed fully dense sintered neo or ferrite-arc magnet, also adds costs for the magnet manufacturer. Bonded magnets, like MQ1TM, can be designed to achieve an optimal air gap flux profile with no additional cost. For isotropic magnets like MQ1TM, different air gap flux profiles can be achieved easily by optimizing the magnetization profile itself.
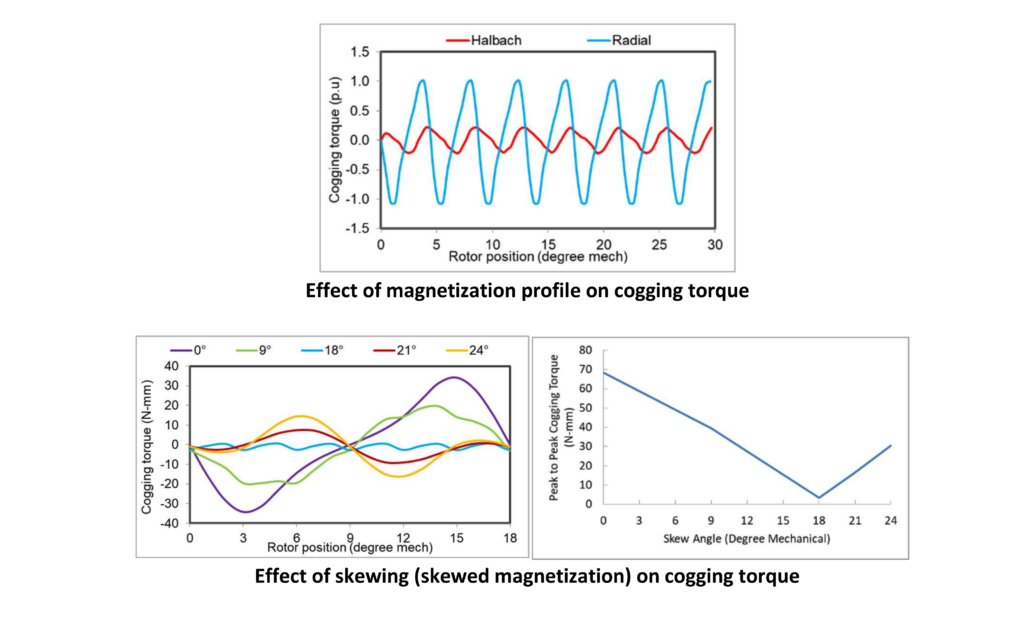
A Halbach magnetization profile (sinusoidal air gap flux density variation) offers lower cogging torque. Halbach magnetization is particularly useful when the magnet has a higher number of poles (>8). This is due to the more gradual rate of change of reluctance compared to radially magnetized magnets.
In designs where radially magnetized isotropic magnets generate unwanted cogging torque, a skew can be applied on the magnetization profile without changing the shape of the magnet itself. Depending on the ultimate desired performance of the motor, isotropic magnets provide multiple paths to optimization.
When designing an electric motor, it is vital to consider that the electric motor does not go in deep saturation; the motor does not have high torque ripple; and, for a PM brushed DC motor, there is no spark at the brush and commutator contact surface.
Magnequench’s team of experts leverages these techniques and experience gained over many years of collaborating with customers to reduce or eliminate possible electromagnetic causes of noise for new or existing electric motors.


